







Wie man den Modellcode liest
Beispiel

| (1) Modellserie |
(2) Spezifikationen |
(3) Hilfsrahmen |
(4) Richtung der Steuerungsachsen |
|---|---|---|---|
| JC-3 Serie |
C0N: Inkremental-Encoder-Modell ※2 Achesen A00: Inkremental-Encoder-Modell ※3 Achesen B01: Inkremental-Encoder-Modell ※4 Achesen D00: Absolut-Encoder-Modell ※3 Achesen |
T:Einseitig H:Beidseitig |
2:2(XY) 3:3(XYZ) 4:4(XYZR) |
| JC-3A00-0T3 | JC-3A00-0H3 | JC-3B01-0H4 | |||||
| Richtung der Steuerungsachsen | 3(XYZ) | 3(XYZ) | 4(XYZR) | ||||
| Betriebsbereich | X-Achshub(mm) | 200/300/400/500/600 | 300/400/500/600 | 300/400/500/600/ | |||
| Y-Achshub(mm) | 200/300 | 200/300/400/500 | 200/300/400/500 | ||||
| Z-Achshub(mm) | 50/100/150/200 | 50/100/150/200/300 | 100/150 | ||||
| R-Achshub(deg) | - | - | ±360 | ||||
| Antriebsmotor | Schrittmotor | Schrittmotor | Schrittmotor | ||||
| X-Achshub | Feedback-Steuerung | Feedback-Steuerung | Feedback-Steuerung |
||||
| Y-Achshub | |||||||
| Z-Achshub | Ungeregelte Steuerung | ||||||
| R-Achshub | - | - | |||||
| Maximale Ladekapazität (kg) |
4 | 8 | 3 | ||||
| Maximale Geschwindigkeit <PTP-Bewegung>*1 |
X Achse(mm) | 200 300 400 |
500 600 |
300 400 |
500 600 |
300 400 |
500 600 |
| X Achse(mm/s) | 700 | 800 | 700 | 800 | 700 | 800 | |
| Y Achse(mm/s) | 800 | 800 | 800 | ||||
| Z Achse(mm/s) | 400 | 400 | 400 | ||||
| R Achse(deg/s) | - | - | 900 | ||||
| R-Achse Zulässiges Massenträgheitsmoment (kg・cm2) |
- | - | 90 | ||||
| Wiederholgenauigkeit*2 | X Achse(mm) | ±0.02 | ±0.02 | ±0.02 | |||
| Y Achse(mm) | ±0.02 | ±0.02 | ±0.02 | ||||
| Z Achse(mm) | ±0.02 | ±0.02 | ±0.01 | ||||
| R Achse(deg) | - | - | ±0.008 | ||||
| Außenabmessungen (ausschließlich Kabel und Überstände) BxTxH(mm) |
Robotereinheit |
B: Y-Achse Hub + 319 T: X-Achse Hub + 309 H: Z-Achse Hub + 357 |
B: Y-Achse Hub + 426 T: X-Achse Hub + 309 H: Z-Achse Hub + 357 |
B: Y-Achse Hub + 426 T: X-Achse Hub + 309 H: Z-Achse Hub + 334 |
|||
| Komplettlösung | 170 x310 x 300 | ||||||
| Gewicht der Haupteinheit (kg) | Robotereinheit | Unterschiedlich je nach Hubkombination. Für weitere Fragen wenden Sie sich gerne an uns. |
|||||
| Komplettlösung | 7.5 | ||||||
*1 Stellt den bei maximaler Ladekapazität und Montage aller Achsen gemessenen Wert dar.
For information about acceleration rates, please refer to the speed & acceleration materials in the Catalog section of our Catalog and Diagram Download page. Je nach Ladekapazität des Roboters kann es sein, dass die maximale Geschwindigkeit nicht erreicht wird. Die jeweilige Geschwindigkeit und Beschleunigung der X- und Y-Achse sind 800mm/s bzw. 5000mm/s2.
*2 Wir haben die Wiederholgenauigkeit bei konstanter Temperatur nach unseren internen Methoden gemessen.
Diese Messung stellt keine Garantie für absolute Präzision dar.
- Diese Werte beziehen sich auf die Standardausführungen und können bei Spezifikationsabweichungen variieren.
Bitte kontaktieren Sie uns um weitere Informationen zu erhalten.
Allgemeine technische Daten
| Steuerungsmethode | PTP-Steuerung (Punkt-zu-Punkt), CP-Steuerung (fortlaufende Bahn) | |
|---|---|---|
| Interpolation | dreidimensionale, lineare und bogenförmige Interpolation | |
| Programmiermethode | Remote-Programmierung (JOG), Manuelle Dateneingabe (MDI) | |
| Programmiersystem |
|
|
| Bildschirmanzeige | Anzeige Maßeinheiten | mm/inch |
| Anzeigesprachen | Folgende Sprachen stehen zur Auswahl bereit: Deutsch・Japanisch・Englisch・Italienisch・Spanisch・Französisch・Koreanisch・Vereinfachtes Chinesisch・Traditionelles Chinesisch・Tschechisch・Vietnamesisch. | |
| Programmkapazität | 999 Programme | |
| Datenkapazität | Bis zu 32.000 Punkte*3 | |
| Einfache PLC-Funktion | Maximal 100 Programme,Maximal 1.000 Schritte/Programm | |
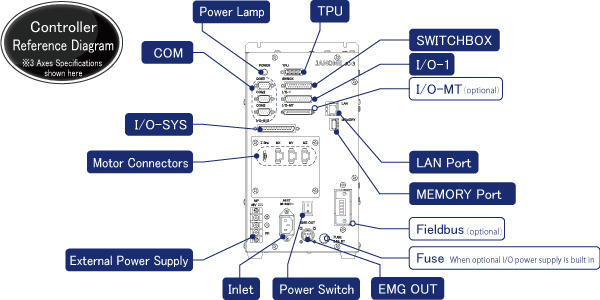
| Externer Ein-/Ausgang |
E/A-SYS*4*6 | 16 Eingänge, 16 Ausgänge |
| E/A-1*4*6 | 8 Eingänge, 8 Ausgänge | |
| E/A-MT (Optional) |
Für Hilfsachsenkontrolle (Pulse String Input Motor*8); kontrolliert bis zu 2 Achsen |
|
| Fieldbus (optional) |
Wählen Sie CC-Link, DeviceNet, PROFIBUS, EtherNet/IP, PROFINET oder CANopen | |
| COM-Port (RS232C) |
RS232C COM1, COM2, COM3 : für die Steuerung externer Geräte |
|
| MEMORY Port | For USB memory connection
|
|
| LAN*5 | Für PC-Anschluss via Ethernet
|
|
| TPU | Spezieller Anschluss für Programmiertafel (optional) | |
| SWITCHBOX | Spezieller Anschluss für Schaltkasten (optional) | |
| EMG OUT | Für den Anschluss eines externen Sicherheitssteuerkreises*9 |
|
| Interne Stromversorgung für E/A | DC24V | |
| Stromversorgung*10 | Wechselstrom 90~240V (Einphasig) 50/60Hz + externer Gleichstrom 48V (abhängig von der Stromversorgung vor Ort)*7 |
|
| Stromverbrauch | 150W (Stromversorgung mit Wechselstrom), 300W (Gleichstrom 48V, motorbetriebene Stromversorgung) |
|
| Temperatur der Betriebsumgebung | 0~40℃ | |
| Relative Feuchtigkeit | 20~85% (nicht-kondensierend) | |
*3 Die Punktdatenkapazität verringert sicht, sobald eine erhöhte Datenmenge für Funktionseinstellungen/Punktdaten/Sequencer eingegeben werden. Grund hierfür ist der gemeinsam genutzte Datenspeicher.
*4 Bei Nutzung einer internen Stromversorgung (optional) ist eine integrierte E/A Stromversorgung erforderlich. 。
*5 LAN-Anschluss 10BASE-T, 100BASE-TX.
*6 Für die E/A-Polarität gibt es zwei Typen: Technische Daten für PNP und NPN.
*7 Bei den technischen Daten für 4 Achsen werden die XY-Achsen über einen externen 48V Anschluss versorgt, während die ZR-Achsen eine 24V Stromversorgung nutzen.
*8 Wir bitten unsere Kunden, ihre eigene Stromversorgung, den Schrittmotor und den Motorantrieb entsprechend selbstständig vorzubereiten.
*9 Unsere Kunden sind selbst verantwortlich für die Einrichtung eines eigenen Sicherheitssteuerkreises.
*10 Bitte treffen Sie an Ihrem Standort die notwendigen Vorkehrungen für eine Stromversorgung mit Wechselstrom 100V/200V oder Gleichstrom 48V.
- Achten Sie bitte auf die korrekte Nutzung des Roboters, und lesen Sie vor der Benutzung die Bedienungsanleitung gründlich durch.
- Der Roboter wird in Einzeteilen geliefert, jede Achse wird seperat verpackt. Daher ist ein Zusammenbau nach Lieferung erforderlich.
- Optionale technische Daten sind erst zum Zeitpunkt des Kaufs verfügbar. Nach Bestelleingang sind keine Änderungen mehr möglich.
- Zur Verbesserung der Produktqualität können die technischen Daten ohne vorherige Ankündigung jederzeit vom Hersteller geändert werden.
- Möglicherweise basiert der Roboter auf technischen Daten, die nicht in dieser Tabelle aufgeführt sind. Für weitere Informationen wenden Sie sich gerne an uns.
Standardzubehör
- Stromanschlusskabel
- Kurzer Anschluss für TPU
- Kurzer Anschluss für SW-BOX
- Anschluss für EMG-OUT
- Montageplatte für Kasten
- Bedienungshandbuch (CD-ROM)
Optionale Erweiterungen
- Optionale Programmiertafel
- ・Mit Notausschalter
- ・Mit Notausschalter/Aktivierungsschalter
- Switchbox
- ・Mit Initialisierungsschalter
- ・Mit Initialisierungsschalter/Modusumschalter
- ・Mit Initialisierungsschalter/Spülumschalter
- ・Mit Initialisierungsschalter/Modusumschalter/Spülumschalter
- Kabelsatz (für Anschluss zwischen Roboter und Steuerungseinheit: 3m/5m)
- Kabelleitungssatz (für X-Achse/Y-Achse)
- E/A-SYS Kabel, E/A-1 Kabel
- Nadeljustierung
- PC Software JR C-PointsⅡ (Windows® 8.1, Windows® 10, Windows® 11 kompatibel)

