JR3000ERT Serie Nutzentrenner Roboter
Der JR3000ERT zeigt, wie er präzise Schnitte auf einer Leiterplatte ausführt.
Klicken Sie hierDas neue Flaggschiff-Modell erweitert Ihre Möglichkeiten noch mehr ...
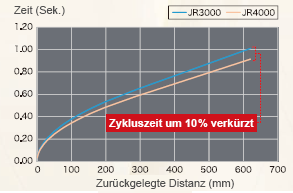
Mit dem JR43000 und größeren Modellen wurde eine Maximalgeschwindigkeit von 1000 mm/s und eine maximale Beschleunigung von 3400 mm/s² erreicht.
Branchenführende Geschwindigkeit verkürzt die Zykluszeit.
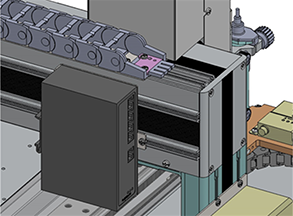
Die Ober- und Rückseite des Y-Achsen-Arms sind mit Nuten zur Befestigung externer Geräte versehen.
Einfache Verdrahtung, wenn externe Werkzeuge usw. angeschlossen werden.
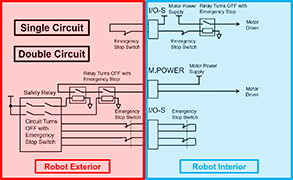
Zusätzlich zum herkömmlichen Sicherheitskreis der Kategorie 1, Performance Level PL=c, besteht die Möglichkeit, einen externen Sicherheitskreis der Kategorie 3, Performance Level PL=d, für gefährliche Arbeiten und/oder Einrichtungen zu konstruieren (mit einem Motorstrom, der ausgeschaltet wird).
Verbinden Sie bis zu 2 Geräte vom Typ „Impulsfolge-Eingang“, wie z. B. Schrittmotoren oder Servomotoren.
2 Steuerungsmodi und eine Encoder-Eingabefunktion für Kompatibilität mit einer Vielzahl von Anwendungen.
① Punktmodus Die Hilfsachsen bewegen sich zusammen mit den X-, Y-, Z- und R-Achsen des Roboters.
Beispiel: Ein 4-Achsen-Roboter, der dosiert, wird auf 6 Achsen erweitert.
Es werden 2 Achsen hinzugefügt, um sowohl den Dosiernadelwinkel als auch den Werkstückwinkel zu verändern. Dadurch werden die Winkel für das Auftragen auf die äußere Randfläche eines in ein rohrförmiges Werkstück geschnittenen Lochs festgelegt.
② Unabhängiger Modus Die Hilfsachsen bewegen sich unabhängig von den X-, Y-, Z- und R-Achsen des Roboters.
Beispiel: Lassen Sie den Roboter eine Aufgabe ausführen, während er ein Förderband bedient.
Die Hilfsachse(n) arbeiten unabhängig von den Punktkoordinaten und Bewegungen, sodass der Roboter Aufgaben wie Dosieren oder Verschrauben ausführen kann, während das Förderband läuft.
③ Encoder-Eingang Erfassen Sie externe Encoderwerte zur Überwachung der Drehbewegung und zur Steuerung der Sensoren.
Mit einer optionalen Kamera As200 zur Positionsanpassung können Sie Positionskorrekturen für verschobene Werkstücke vornehmen, um präzise Ergebnisse zu erzielen.
Es ist keine spezielle Kamerasoftware erforderlich; sowohl die Einstellungen für Roboter als auch für die Kamera können mit unserer Original-Software „JR C-Points III“ vorgenommen werden.

Zusätzlich zu den Funktionen für die Signalsteuerung und den Datenaustausch auf Basis von Punktjobs unseres Vorgängermodells haben wir dem JR4000 eine „Feldbus-Register-Ausgabefunktion“ für die konstante Ausgabe bestimmter Datentypen hinzugefügt, die es dem Benutzer ermöglicht, die erforderlichen Daten konsistent von einer SPS zu erfassen, ohne komplizierte Einstellungen vornehmen zu müssen.
Programmieren Sie den Roboter frei mit Punktjobs, sogar mit Jobs, für die es keine voreingestellten Punkttypen gibt.
Im Vergleich zu unserem Vorgängermodell bietet der JR4000 mehr nutzbare Befehle und integrierte Variablen sowie erweiterte Funktionen zur individuellen Anpassung.
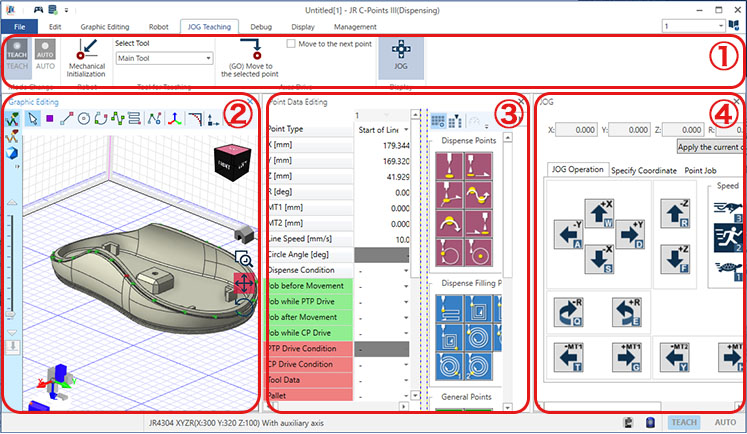
Die Original-PC-Software „JR C-Points III“ von Janome ist ein umfassendes interaktives Programmeingabesystem, mit dem Benutzer Teaching-Daten und benutzerdefinierte Daten auf ihrem PC erstellen, bearbeiten und speichern können.
Lassen Sie sich die Koordinaten der Bewegungspunkte grafisch anzeigen, um den Programminhalt intuitiv zu erfassen, und konvertieren Sie Koordinaten aus CAD-Daten. Die Parametereinstellungen werden auch in der praktischen Baumansicht zur Bestätigung und Bearbeitung angezeigt.
Konvertieren Sie „JR C-Points II“-Teaching-Daten in „JR C-Points III“-Daten zur Verwendung mit dem JR4000.
① Farbbandsteuerung
Klicken Sie auf die einzelnen Kategorien und die Funktionsschaltflächen und Einstellungselemente für diese Registerkarte werden angezeigt.
② Ansicht „Grafik-Bearbeitung“
Teachen Sie visuell mit der 3D-Ansicht im Grafikbearbeitungsbereich der 3D-Anzeige.
③ Ansicht „Punktdatenbearbeitung“
Bearbeiten Sie die ausgewählten Punktdatenelemente direkt, einschließlich Punkttyp, Koordinatenpositionen, Punktjob usw.
④ JOG-Ansicht
Verbinden Sie sich mit dem JR4000-Roboter und führen Sie JOG-Bewegungen direkt von einem PC aus.
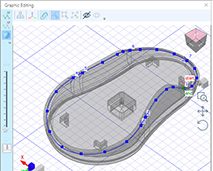
Beziehen Sie sich auf hochgeladene 3DCAD-Daten, generieren Sie automatisch Programmpunkte und reduzieren Sie Ihren Teachingaufwand erheblich.
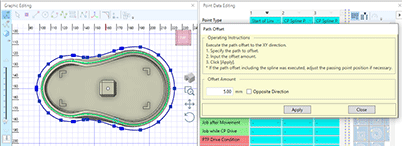
Eine neue Punktart, „Spline Curve Drive“, ist in das Systemprogramm integriert, sodass auch Werkstücke mit schwierigen Formen bearbeitet werden können.
Das Koordinatenbild auf dem Grafikdisplay lässt sich einfach versetzen, vergrößern oder verkleinern.
Passen Sie die Koordinaten an die des Roboters an, um die Bedienung zu vereinfachen.
Wählen Sie einen Menüpunkt oder eine Funktion aus und die „Kurzanleitung“ zeigt eine Erklärung dieser Auswahl auf dem Display der PC-Software an. Sie müssen nicht erst die Betriebsanleitung herausholen, um den Inhalt einer bestimmten Funktion zu überprüfen.
Wechseln Sie zwischen Standard-PC und Tablet-PC.
Bedienen Sie den Roboter auch in verschiedenen Umgebungen bequem.

*Verwenden Sie aus Sicherheitsgründen einen Safety Commander©, wenn Sie einen Tablet-PC verwenden.
*Safety Commander© ist eine Marke und/oder eingetragene Marke von IDEC CORPORATION.
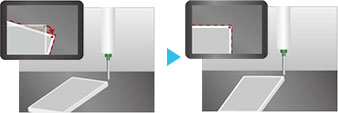
Konvertiert die Jobkoordinaten und passt sie an die Koordinaten jedes einzelnen Werkstücks an, die in die Software geschrieben wurden, um individuelle Abweichungen auszugleichen, wenn derselbe Job auf mehreren Werkstücken ausgeführt wird. Die horizontale Einrichtung ist effizienter, da der zusätzliche Aufwand für die Anpassung entfällt.
Legen Sie ein Passwort für ein Windows-Konto mit Administratorrechten fest und sperren Sie die Daten, damit sie nicht von anderen Konten geändert oder überschrieben werden können.
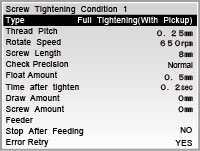
Spezielle Software für Verschrauben und Dosieren.
Programme zum Verschrauben können problemlos erstellt werden: Legen Sie hierfür lediglich die Parameter für das Anziehen der Schrauben, z. B. Spindelsteigung, Länge und rpm des Antriebs als Arbeitspositionen fest.
Anwendungsbeispiele

Roboter mit integriertem Schrauber und Schraubenspender.
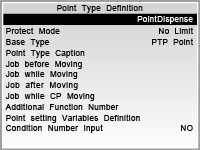
Das Erstellen von Dosierprogrammen ist einfach. Sie müssen lediglich die Positionen für die Dosierparameter, z. B. Punkt- oder Liniendosierung festlegen.
Anwendungsbeispiele

Roboter mit integrierter Dosiereinheit.
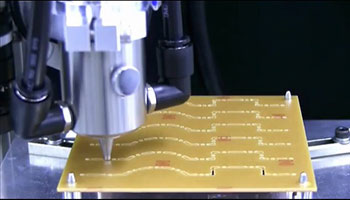
Der JR3000ERT zeigt, wie er präzise Schnitte auf einer Leiterplatte ausführt.
Klicken Sie hier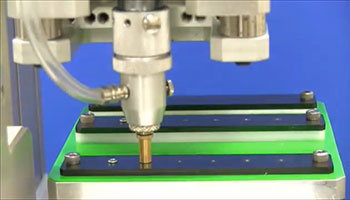
Der JR3000 demonstriert das Aufnehmen und Anziehen von Schrauben sowie das Lösen und das Ablegen der Schraube an einem festgelegten Ablagepunkt.
Klicken Sie hier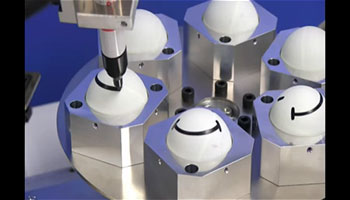
Die Roboter-Zusatzachsenfunktion wird verwendet, um auf einer gekrümmten Oberfläche zu zeichnen.
Klicken Sie hierBenötigen Sie ein individuelles Design?
Wir bieten verschiedene Variationen an, um spezifische Größen- und Konfigurationsanforderungen zu erfüllen.
Testen Sie Ihren Prozess auf unseren Maschinen. Bitte kontaktieren Sie uns für weitere Informationen.