-
Allgemein:
・PC Software "JR C-PointsⅢ" (Windows®10 64bit, Windows®11 kompatibel) Wechseln Sie zwischen Japanisch und Englisch.
・E/A-SYS Terminalstecker
・E/A-SYS Anschlusskabel (2m/3m/5m)
・E/A-SYS-Anschlussblock (0.5m/2m)
・E/A-1 Terminalstecker
・E/A-1 Anschlusskabel (2m/3m/5m)
・E/A-1-Anschlussblock(0.5m/2m)
・E/A-MT Terminalstecker
・E/A-MT Anschlusskabel (0.5m/1m/3m/5m/10m)
・ENC-IN Terminalstecker
・AS200 Kamera zur Positionsanpassung
・Nadeljustierung
・Energieführungskette (nur für Standard- und Dosiermodelle)
・Programmiertafel (2m/3m/5m)
- Standard Typ
- Mit Notausschalter
- Mit Aktivierungsschalter
- Mit Modusumschalter
- Mit Notausschalter + Aktivierungsschalter
- Mit Notausschalter + Modusumschalter
- Mit Aktivierungsschalter + Modusumschalter
- Mit Notausschalter + Aktivierungsschalter + Modusumschalter
- Spezifikation Bedienfeld Typ B:
・Schaltbox(2m/3m/5m)
- Standard Typ
- Mit Modusumschalter
- Mit zusätzlichem Schalter
- Mit Modusumschalter + zusätzlichem Schalter
JR4000 Serie
Tisch-Roboter JR4000 Serie
Das neue Flaggschiff-Modell erweitert Ihre Möglichkeiten noch mehr ...
Technische Daten
3 Achsen
*Horizontal scrollen
| JR4203 | JR4303 | JR4403 | JR4503 | JR4603 | ||
|---|---|---|---|---|---|---|
| Betriebsbereich | X・Y Achsen | 200×200mm | 300×320mm | 400×400mm | 510×510mm | 510×620mm |
| Z Achsen | 50mm | 100mm | 150mm | |||
| Maximale Ladekapazität | Werkstück | 7kg | 15kg | |||
| Werkzeug | 3.5kg | 7kg | ||||
| Maximale Geschwindigkeit *1 <PTP Bewegung> ( )=Einstellbereich |
X・Y Achsen | 700mm/s (7~700) |
1000mm/s (10~1000) |
|||
| Z Achsen | 250mm/s (2.5~250) |
400mm/s (4~400) |
||||
| Maximale Geschwindigkeit *1 <CP Bewegung> =Einstellbereich |
X・Y・Z Kombinierte Geschwindigkeit |
600mm/s (0.1~600) |
850mm/s (0.1~850) |
|||
| Wiederholgenauigkeit *2 | X Achsen | ±0.006mm | ±0.007mm | ±0.008mm | ±0.008mm | |
| Y Achsen | ±0.01mm | |||||
| Z Achsen | ±0.008mm | |||||
| Außenabmessungen*3 ( )=Doppel-Säulen-Typ |
BxTxH *ausschließlich Kabel und Überstände |
323×389×554mm | 560×535×659mm | 584×630×807mm (615×631×807) |
678×730×807mm | 790×730×807mm |
| Gewicht der Haupteinheit*3 ( )=Doppel-Säulen-Typ |
20kg | 36kg | 42kg (45) |
45kg | 46kg | |
4 Achsen
*Horizontal scrollen
| JR4204 | JR4304 | JR4404 | JR4504 | JR4604 | ||
|---|---|---|---|---|---|---|
| Betriebsbereich | X・Y Achsen | 200×200mm | 300×320mm | 400×400mm | 510×510mm | 510×620mm |
| Z Achsen | 50mm | 100mm | 150mm | |||
| R Achsen | ±360° | |||||
| Maximale Ladekapazität | Werkstück | 7kg | 15kg | |||
| Werkzeug | 3.5kg | 7kg | ||||
| Maximale Geschwindigkeit*1 <PTP Bewegung> ( )=Einstellbereich |
X・Y Achsen | 700mm/s (7~700) |
1000mm/s (10~1000) |
|||
| Z Achsen | 250mm/s (2.5~250) |
400mm/s (4~400) |
||||
| R Achsen | 600°/s (6~600) |
900°/s (9~900) |
||||
| Maximale Geschwindigkeit*1 <CP Bewegung> ( )=Einstellbereich |
X・Y・Z Kombinierte Geschwindigkeit |
600mm/s (0.1~600) |
850mm/s (0.1~850) |
|||
| Akzeptables Massenträgheitsmoment | 65kg・cm² | 90kg・cm² | ||||
| Wiederholgenauigkeit *2 | X Achsen | ±0.006mm | ±0.007mm | ±0.008mm | ||
| Y Achsen | ±0.01mm | |||||
| Z Achsen | ±0.01mm | |||||
| R Achsen | ±0.008° | |||||
| Außenabmessungen*3 ( )=Doppel-Säulen-Typ |
BxTxH *ausschließlich Kabel und Überstände |
323×389×676mm | 560×535×844mm | 584×630×894mm (615×630×894) |
678×730×894mm | 790×730×894mm |
| Gewicht der Haupteinheit*3 ( )=Doppel-Säulen-Typ |
22kg | 39kg | 46kg (49) |
49kg | 50kg | |
- *1 Die Maximalgeschwindigkeit kann je nach Bedingungen variieren. Bei maximaler Traglast kann der Roboter die Maximalgeschwindigkeit nicht erreichen.
- *2 Die Positions-Wiederholgenauigkeit garantiert keine absolute Präzision.
- *3 Bei optionalen Spezifikationen können sich die Außenabmessungen und das Gewicht ändern. Bitte kontaktieren Sie uns für weitere Informationen.
Allgemeine technische Daten
*Horizontal scrollen
| Antriebsmethode | Antrieb für 5-Phasen-Schrittmotor (Encoder ist optional erhältlich) | |
|---|---|---|
| Steuerungsmethode | PTP-Steuerung (Punkt-zu-Punkt), CP-Steuerung (fortlaufende Bahn) | |
| Interpolation | 3-dimensionale lineare, 3-dimensionale Bogeninterpolation und Spline-Kurveninterpolation | |
| Programmiersystem | Remote-Programmierung (JOG)/ Manuelle Dateneingabe (MDI) | |
| Programmiermethode | ・Direct teaching using the optional teaching pendant ・Offline-Programmierung über einen PC und der optionalen PC Software "JR C-Points Ⅲ". Kompatibel mit CAD-Grafiken (DXF, STEP, IGES, DWG, JPEG). |
|
| Anzeigesprachen | Japanisch・Englisch・Französisch・Spanisch・Italienisch・Deutsch・Koreanisch・Vereinfachtes Chinesisch・Traditionelles Chinesisch・Tschechische・Vietnamesisch | |
| Programmkapazität | 999 Programme | |
| Datenkapazität | Bis zu 32.000 Punkte*4 | |
| Einfache PLC-Funktion | Bis zu 100 Programme, mit bis zu 1.000 Schritte pro Programm | |
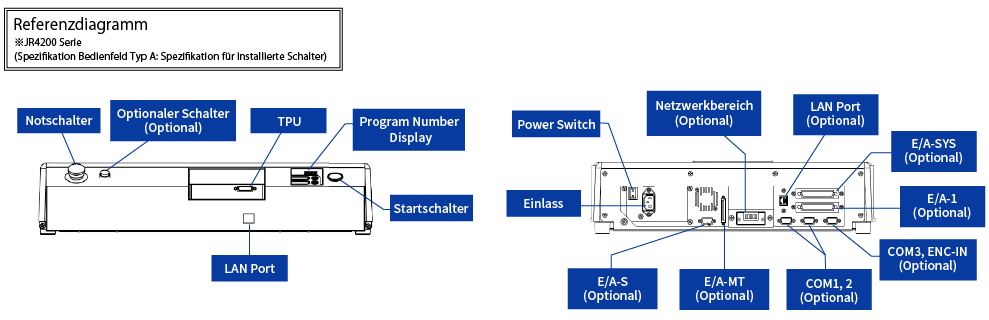
| Externer Ein-/Ausgang | E/A-SYS*5 (optional) |
16 Eingänge, 16 Ausgänge |
| E/A-1*5 (optional) |
16 Eingänge, 14 Ausgänge (einschließlich 2 Relaisausgänge) | |
| E/A-S*6 (optional) |
Anschluss für Verriegelungseinrichtung für Lichtschranke, usw. ①E/A-S1: Standard-Sicherheitskreis ②E/A-S2: Redundanter Sicherheitskreis | |
| E/A-MT (optional) |
Für Hilfsachsenkontrolle (Pulse String Input Motor*7); kontrolliert bis zu 2 Achsen |
|
| Netzwerkbereich (optional) |
CC-Link, DeviceNet, PROFIBUS, EtherNet/IP, PROFINET, CANopen | |
| COM1(optional) | RS-232C für die Steuerung externer Geräte, COM-Befehle | |
| COM2, COM3*8 (optional) |
RS-232C für die Steuerung externer Geräte | |
| LAN*9 | Ethernet-Anschluss für PC ・Steuerung des Roboters über Steuerbefehle ・Verbindung mit (optionaler) PC Software "JR C-Points Ⅲ" (Senden und Empfangen von benutzerdefinierte und Programmierdaten, Upgrade Systemsoftware) (Optional: Installation eines Anschlusses auf der Rückseite) |
|
| ENC-IN*8 (optional) |
Für die externe Eingabe von Encoderwerten | |
| TPU | Spezieller Anschluss für Programmiertafel (optional) | |
| SWITCHBOX*10 | Spezieller Anschluss für Schaltkasten | |
| Stromversorgung für integrierten E/A(optional) | 24V Nennleistung 2,1A | |
| Stromquelle | AC100-120V/200-240V (Einphasig) 50/60Hz | |
| Stromverbrauch | 200W | |
| Stromverbrauch | Betriebstemperatu | 0~40°C |
| Relative Feuchtigkeit | 20~90% (Ohne Kondensation) | |
- *4 Die Speicherkapazität für Punktdaten verringert sich aufgrund des gemeinsam genutzten Speicherbereichs mit zunehmenden zusätzlichen Funktionsdaten, Punktjob-Daten und Sequenzerdaten.
- *5 Es sind 2 E/A-Polaritätstypen verfügbar: PNP und NPN.
- *6 E/A-S2 ist nicht mit Modellen mit 200 mm Hub verfügbar.
- *7 Bitte bereiten Sie eine Steuerspannungsversorgung, einen Impuls angetriebenen Motor und einen entsprechenden Motortreiber vor.
- *8 Kontaktieren Sie uns gerne für weitere Informationen.
- *9 Es ist möglich, entweder COM3 oder ENC-IN hinzuzufügen, beides ist nicht möglich.
- *10 Die Ethernet-Verbindung ist 10BASE/100BASE-T.
- *11 Als Bedienfeld ist nur Typ B erhältlich.
- Optionale technische Daten sind erst zum Zeitpunkt des Kaufs verfügbar. Nach Bestelleingang sind keine Änderungen mehr möglich.
- CE-zertifizierte Modelle sind ebenfalls erhältlich.
- Zur Verbesserung der Produktqualität können die technischen Daten ohne vorherige Ankündigung jederzeit vom Hersteller geändert werden.
Standardzubehör
- Allgemein: Stromanschlusskabel
Optionale Erweiterungen
Bitte fragen Sie nach besonderen Spezifikationen
Benötigen Sie ein individuelles Design?
Wir bieten verschiedene Variationen an, um spezifische Größen- und Konfigurationsanforderungen zu erfüllen.
Tests und Versuche
Testen Sie Ihren Prozess auf unseren Maschinen. Bitte kontaktieren Sie uns für weitere Informationen.